หน้าแรก
ค้นหา
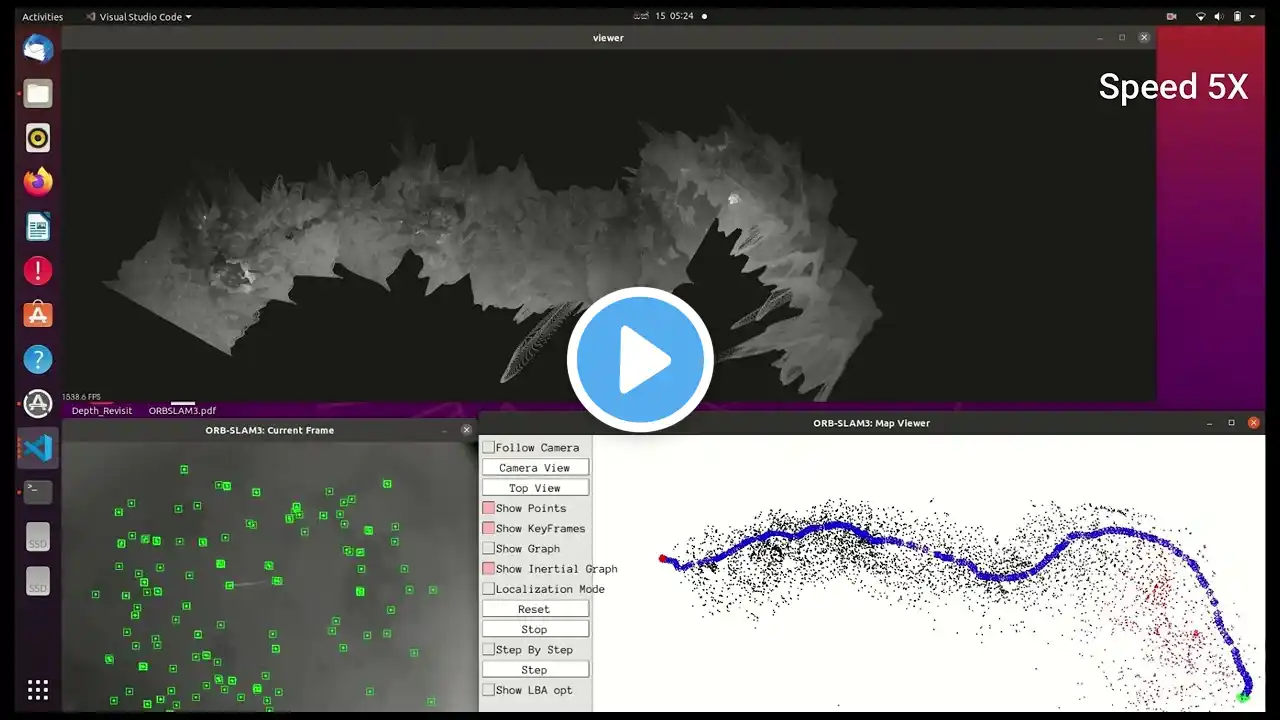
[202012] Underwater Graph-based SLAM Result
No description available
แสดงข้อมูลเพิ่มเติม 1
[202012] Underwater Graph-based SLAM Result
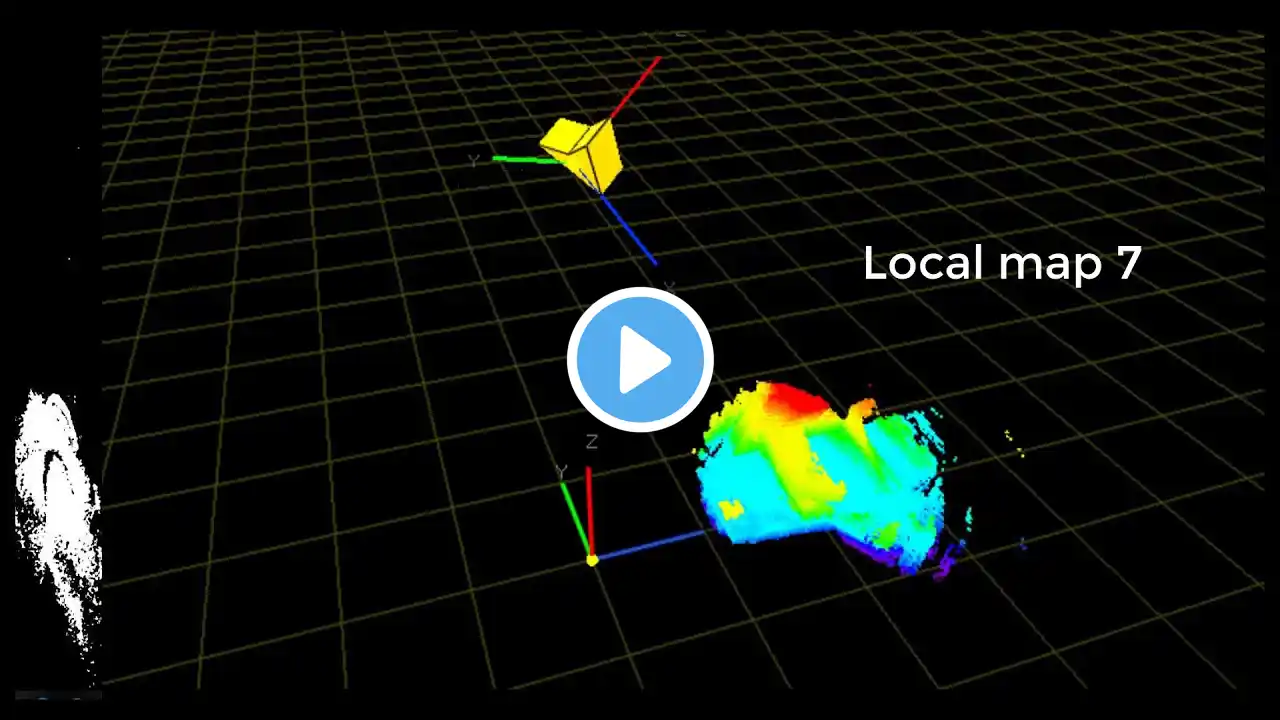
[202012] Underwater Graph-based SLAM Local Mapping
Underwater SLAM results comparison
Preliminary underwater SLAM results using Dual-SLAM - Okinawa
Preliminary underwater SLAM results using Dual-SLAM - Little Palm Beach
SVIn2: An Underwater SLAM System using Sonar, Visual, Inertial, and Depth Sensor
Fusing SLAM with Satellite Imagery to reduce drift for AUV's
Overhead Image Factors for Underwater Sonar-based SLAM Visual Aids
Overhead Image Factors for Underwater Sonar-based SLAM Presentation
V SLAM, huber and refrence jacobian, Underwater image
Preliminary underwater SLAM results using Dual-SLAM - Great Barrier Reef
UW Deep SLAM generating Dense map for Underwater Aqualoc dataset
Underwater Pose SLAM using GMM Scan Matching for a Mechanical Profiling Sonar
ROB 530 - Final Group 10: Pose Graph SLAM for Underwater Cave Exploration
Bridge Inspection Using Unmanned Aerial Vehicle Based on HG-SLAM: Hierarchical Graph-based SLAM
UW-SLAM Tracking Underwater sequences (implemented on Mathlab)
Feature-based laser SLAM system (PUT-robot dataset)
Robust Underwater SLAM using Autonomous Relocalisation
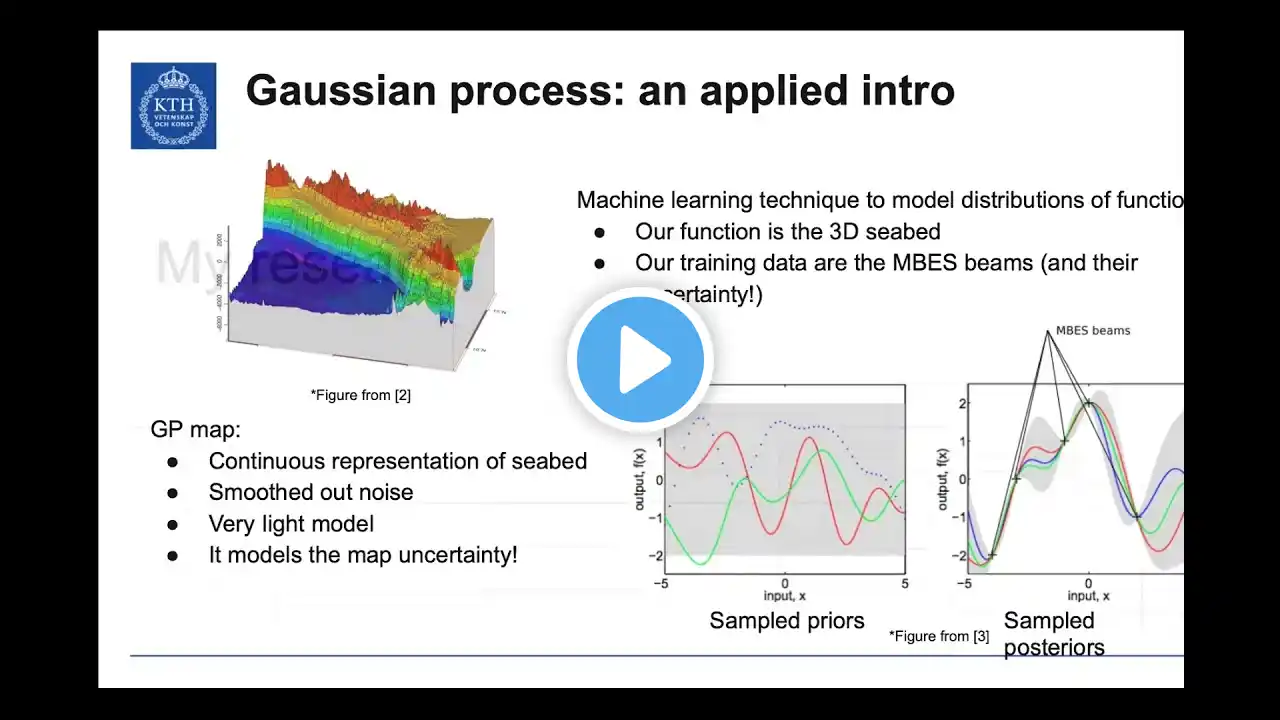
Ignacio Torroba, ML for uncertainty modelling in underwater SLAM
Katherine Skinner | Deep Learning for Marine Robot Perception | Tartan SLAM Series
![[202012] Underwater Graph-based SLAM Result](https://thaitubemp3.com/image/TPigp77k-u4.webp)