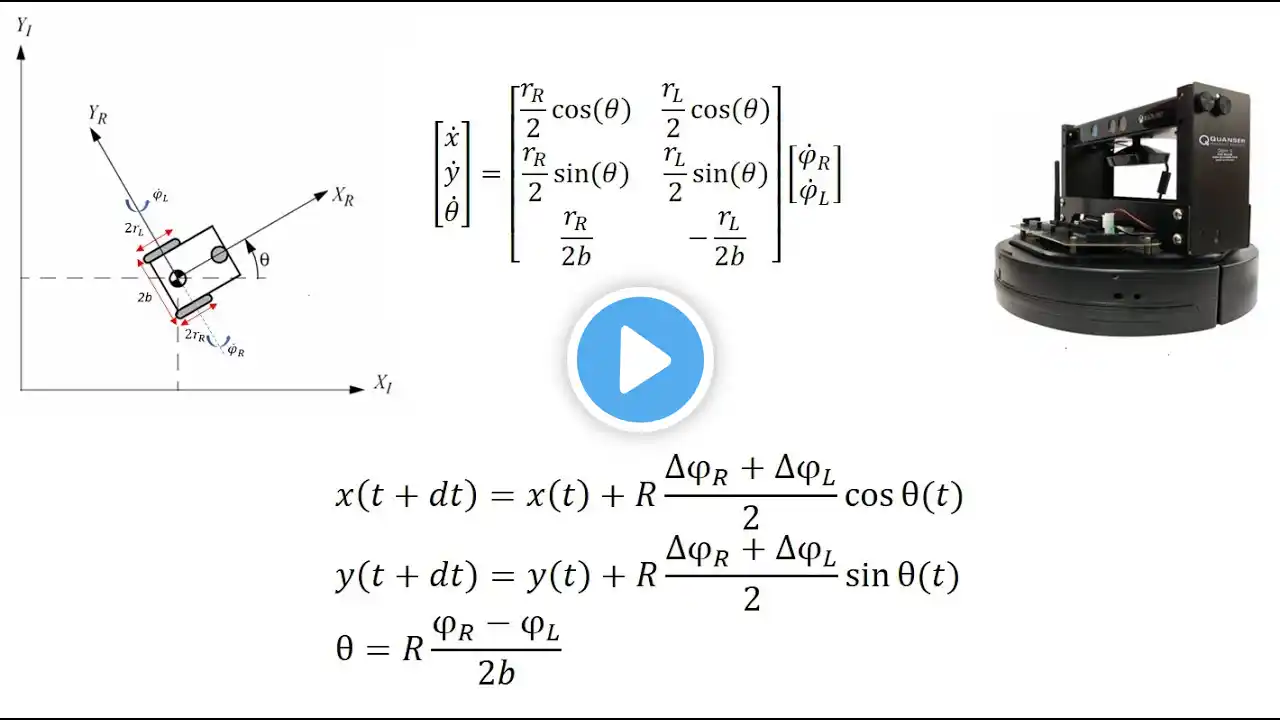
Mark 01 - Differential Robot #4 : Odometry and PID Controller
How to localize your robot using the wheel encoders and how to implement a PID controller to make your robot move to a goal location. Mark01 is a differential robot based on a Rasberry Pi. Command to download the project in the Raspberry Pi: git clone -b "v4.1" http://github.com/gusbots/mark01.git 0:00 Intro 0:51 Clone the project, connect PS4 controller, and run mark01.py 1:55 Test Cases (autonomous mode) 4:07 Calibration 5:39 Code Review Instagram: / gusbots