Performance Indices in Control Systems Design 🌟 Theory & Many Practical Examples! 👍
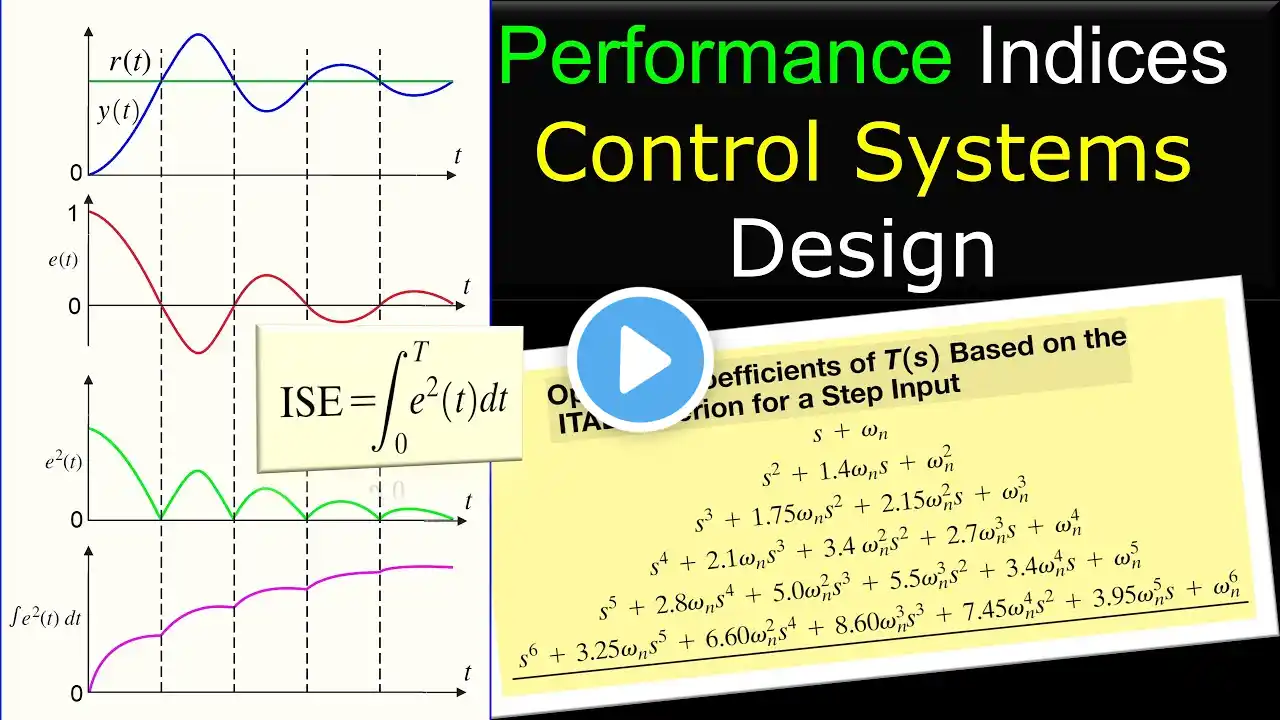
In this video, we will discuss the Performance Indices in Control Systems Design. Performance indices are used when we need to make a choice between several design for the same set of specifications. Modern control systems require more sophisticated performance indices (criteria). A system is considered an optimal control system when the system parameters are adjusted so that the index reaches an extremum, commonly a minimum value. To be useful, a performance index must be a number that is always positive or zero. Then the best system is defined as the system that minimizes this index. 🟡 Examples of performances indices used most in practice are: 🔻 Integral of the Square of the Error (ISE) 🔻 Integral of the Absolute Magnitude of the Error (IAE) 🔻 Integral of Time Multiplied by Absolute Error (ITAE) For a design of a control system, we often have a specifications given in time domain (e.g.: rise time and overshoot) or in frequency domain (e.g.: phase margin and bandwidth). In the design process, we could have designed, for example, two systems which both meet the specifications, but one design has better transient response performance and the other has better steady-state performance. Which one of these two design should we choice? The answer to this questions is not easy. To make a more traceable an logical choice between several design for the same set of specifications, we can use a performance index to judge the design based on this performance index. The analysis will becomes little more complex, but the motivation to choose one system over the other can be given more correctly. 🎯 Outline: ⏩ 00:00:00 Introduction ⏩ 00:00:21 Outline ⏩ 00:02:44 1. Design Criteria ⏩ 00:07:04 2. Performance Indices ⏩ 00:17:27 3. Quadratic Performance Indices ⏩ 00:26:59 Example 1: Determine an Optimal Transfer Function ⏩ 00:34:40 Computation of Spectral Factorization ⏩ 00:46:29 Example 2: Computation of Spectral Factorization ⏩ 00:51:24 4. Selection of Weighting Factor ⏩ 00:52:59 Example 3: Selection of Weighting Factor ⏩ 00:58:35 5. ITAE Optimal Systems ⏩ 01:02:45 Example 4: Second-Order ITAE Optimal System for Zero-Position Error ⏩ 01:07:46 Example 5: Second-Order ITAE Optimal System for Zero-Velocity Error 👉 More videos about Control Systems: • Control Systems ⭐ If you have questions or comments, please let me know. Help us to reach more people. Like and share this video. Subscribe to our channel: https://www.youtube.com/canbijles/?su... ⚡ CAN Education - Tutoring in Electrical Engineering, Analog Electronics, Power Electronics, Electric Circuits, Control Systems, and Math Courses ⭐ For questions, collaboration or consulting 👇 📧 [email protected] ☎️ +31616179479 🌐 www.canbijles.nl #control #transferfunction #transient #performance #design #criterion #error #signal #linear #linearization #systems #spectralfaztorization #Hurwitz #optimalperformance #ITAE #ISE #SystemIdentification #StepResponse #PIcontroller #controller #design #response #analog #integrator #phase #angle #magnitude #system #electronics #circuits #matlab #simulink #overshoot #step #steadystate #settlingtime #controlengineering #polezero #poles #zeroes #overshoot #settling #time #peaktime #risetime #steadystate #electriccircuits #electricalengineering
